«Луноход»
с микроконтроллерным
управлением
«луноход» с проводным дистанционным управлением, приводимая в движение двумя электродвигателями постоянного. С включением питании модель начинает двигаться вперед. Одновременно включаются смонтированные в ней передатчик и приемник импульсного ИК излучения. Движение продолжается до установленного порога, что свидетельствует о наличии препятствия на пути. Как только это случится, модель разворачивается до тех пор, пока отраженный сигнал не станет ниже этого порога, потом продолжает движение вперед и т. д.
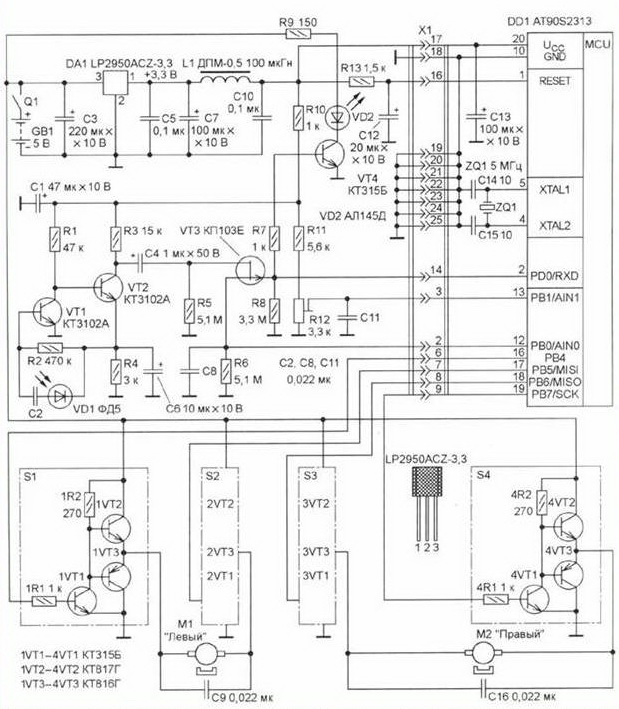
Принципиальная схема программно-аппаратного комплекса управления моделью «лунохода» изображена на рисунке. Его основа — экономичный восьмибитный КМОП микроконтроллер (МК) AT90S2313 (DD1), построенный с использованием расширенной RISC архитектуры AVR. Тактовую частоту задает кварцевый резонатор ZQ1 на частоту 5 МГц (она может быть и любой другой, вплоть до 10 МГц). Цепь из резистора R13 и конденсатора С12 служит для сброса МК в момент включения мигания.
кроме микроконтроллера, устроиство содержит импульсный передатчик ИК излучения (VT4, VD2).Приемник отраженного препятствием излучения, состоящий из фотодиода VD1, двухкас-кадного усилителя (VT1, VT2) и синхронного детектора (VT3), и четыре 4VT1— 4VT3). Питается устройство от батареи, состоящей из четырех Ni-Cd
аккумуляторов (1500ма\ч). Нэпряжениеи приемника ИК излучения поддерживается билизатором напряжения DA1,
В процессе работы с выхода порта PDO на базу транзистора VT4 поступаютоколо 1220 Гц. В результате он периодически
Открывается и включенный в его коллекторную цепь светодиод VD2 создает в направлении движения модели пульсирующее с указанной частотой ИК излучение. Резистор R7 ограничивает ток через эмиттерный переход транзистора и защищает выход МК порта от повреждений при пробое этого перехода. Максимальный ток через светодиод ограничивает резистор R9.
Отраженное припятствием ИК излучение воспринимается фотодиодом VD1 включенным параллельно резистору R2, через который осуществляется ООС по постоянному току.
НЕХ файл прошивки МК











