| Календарь |
| « Май 2011 » |
| Пн |
Вт |
Ср |
Чт |
Пт |
Сб |
Вс |
| | | | | | | 1 | | 2 | 3 | 4 | 5 | 6 | 7 | 8 | | 9 | 10 | 11 | 12 | 13 | 14 | 15 | | 16 | 17 | 18 | 19 | 20 | 21 | 22 | | 23 | 24 | 25 | 26 | 27 | 28 | 29 | | 30 | 31 | |
|
| Статистика |


Онлайн всего: 1 Гостей: 1 Пользователей: 0 |
|
|
|
|
|
|
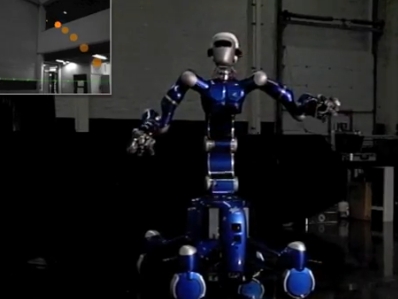 Правда, кофе он варит не в джезве (турке), а в продвинутой кофеварке, но это уже что-то. Этот робот, получивший имя Rollin' Justin, наверное, может выступать и в цирке, помогая жонглерам ловить упавшие мячики. Он способен во время полета мячика оценить его траекторию и место падения, подставляя манипулятор туда, куда мячик падает. Способен робот и на выполнение нескольких задач одновременно — по крайней мере, его научили ловить по два мячика. Правда, кофе он варит не в джезве (турке), а в продвинутой кофеварке, но это уже что-то. Этот робот, получивший имя Rollin' Justin, наверное, может выступать и в цирке, помогая жонглерам ловить упавшие мячики. Он способен во время полета мячика оценить его траекторию и место падения, подставляя манипулятор туда, куда мячик падает. Способен робот и на выполнение нескольких задач одновременно — по крайней мере, его научили ловить по два мячика.
|
|
Добавил: MrOnegin | Дата: 12.05.2011 | Комментарии: (0) | Рейтинг: 0/0
|
|
| |
|
|
|
 Очередная новость от Willow Garage — теперь робот PR2 умеет открывать холодильник, находить бутылку нужной марки пива и доставать эту бутылку. Затем, робот закрывает холодильник и даже открывает бутылку открывашкой!
|
|
Добавил: MrOnegin | Дата: 12.05.2011 | Комментарии: (1) | Рейтинг: 0/0
|
|
| |
|
|
|
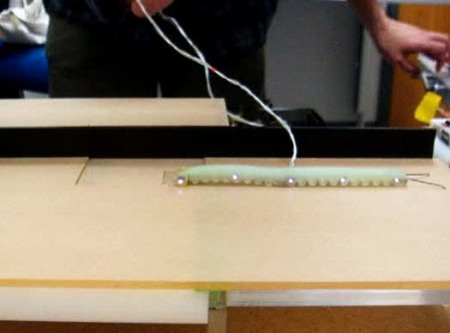 Мало кому нравятся гусеницы, однако их пластичности остается только позавидовать. Гусеницы некоторых видов бабочек способны избегать опасности с завидной скоростью — и ученые университета Тафтса решили создать устройство, которое могло бы использовать принципы движения живого существа. Вообще говоря, в последнее время разработчики выдали на-гора довольно много действующих моделей роботов, прототипом для которых послужили живые существа. Это и кибернетические чайки, и роботы-змеи и другие представители «зоопарка».
|
|
Добавил: MrOnegin | Дата: 12.05.2011 | Комментарии: (0) | Рейтинг: 0/0
|
|
| |
|
|
|
 Timothy Payne опубликовал инструкцию по созданию робота POLYRO (oPen sOurce friendLY RObot), который использует в качестве основы TurtleBot. Timothy Payne опубликовал инструкцию по созданию робота POLYRO (oPen sOurce friendLY RObot), который использует в качестве основы TurtleBot.
Вместо TurtleBot-ского столика, POLYRO представляет удобное туловище, которое позволит роботу взаимодействовать с людьми.
|
|
Добавил: MrOnegin | Дата: 12.05.2011 | Комментарии: (0) | Рейтинг: 0/0
|
|
| |
|
|
|
 Google считается одним из ведущих в мире разработчиков автомобилей на программном управлении — на них работает стенфордский профессор Себастьян Тран (Sebastian Thrun), который ещё в 2005 году выиграл конкурс DARPA на лучшую систему автономного управления. И вот наступил момент, когда «роботы» созрели для использования в полевых условиях, то есть на общественных дорогах общего назначения, в окружении живых водителей-людей. Правда, для этого нужно изменить законодательство и правила дорожного движения. Google считается одним из ведущих в мире разработчиков автомобилей на программном управлении — на них работает стенфордский профессор Себастьян Тран (Sebastian Thrun), который ещё в 2005 году выиграл конкурс DARPA на лучшую систему автономного управления. И вот наступил момент, когда «роботы» созрели для использования в полевых условиях, то есть на общественных дорогах общего назначения, в окружении живых водителей-людей. Правда, для этого нужно изменить законодательство и правила дорожного движения.
|
|
Добавил: MrOnegin | Дата: 12.05.2011 | Комментарии: (0) | Рейтинг: 0/0
|
|
| |
|
|
|
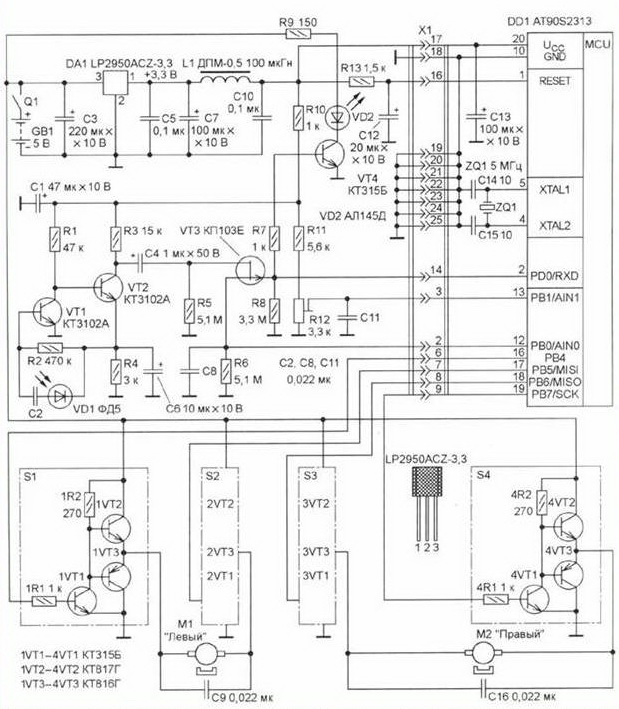 «Луноход»
с микроконтроллерным
управлением
«луноход» с проводным дистанционным управлением, приводимая в движение двумя электродвигателями постоянного. С включением питании модель начинает двигаться вперед. Одновременно включаются смонтированные в ней передатчик и приемник импульсного ИК излучения. Движение продолжается до установленного порога, что свидетельствует о наличии препятствия на пути. Как только это случится, модель разворачивается до тех пор, пока отраженный сигнал не станет ниже этого порога, потом продолжает движение вперед и т. д.
|
|
Добавил: MrOnegin | Дата: 12.05.2011 | Комментарии: (0) | Рейтинг: 0/0
|
|
| |
|
|
|
| |
|
|










